大模型训练-优化器整理
优化器指的是对于我们的一堆模型参数 θ ,以及一个损失函数 L(θ) ,如何找到找到 L(θ) 的最小值。
SGD
随机梯度下降 Stochastic Gradient Descent SGD 是最为基础的梯度下降方法。
其核心思路是:在每一步迭代中,用当前的梯度,按着负梯度方向把参数“推”一点,直到 loss 变得更小。
对于一个模型参数 θ,目标是最小化损失函数 L(θ),SGD 每一步的更新公式是:
θ:模型参数
η:学习率(step size)
∇θL:当前梯度
依据更新时使用的样本数的不同,它可以分为多种类型:
如果用 整个训练集 来计算一次梯度,叫 Batch Gradient Descent
如果用 一个样本 来计算梯度,叫 True SGD
如果用 一个小批量样本(如32、64、128),叫 Mini-batch SGD(最常用)
Mini-batch SGD 就是现在主流训练方法——又能并行训练,又比逐样本快。
SGD足够简单和直观,但是SGD也有一些明显的缺点:
Momentum
Momentum(动量法) 是在 SGD 基础上的进行了优化,它引入了动量机制,它用过去的“梯度方向”给当前的更新加“惯性”!像小球在山谷中滑行,会积蓄动能,不会被小坑困住。
Momentum的更新公式如下:
γ:动量系数(一般取 0.9 或 0.99)
v_t:累计的更新速度(类似速度向量)
η:学习率
∇θL(θt):当前梯度
v_t累积了过去的动量,使得在进行梯度更新的时候具有了惯性。
但是它也存在明显的缺点:
AdaGrad
SGD的一个问题在于所有参数都共用同一个学习率,而这会导致:
大梯度的参数震荡很厉害
小梯度的参数几乎不更新
为此AdaGrad提出依据历史的梯度信息来调整学习率。其参数更新的计算公式如下:
首先记录每个参数过去所有的梯度平方的“累计值”:
然后更新参数的时候,把学习率除以这个值的平方根:
θt:第 t 次迭代的参数
η:初始学习率
g_t:当前梯度
G_t:当前参数的梯度平方和
ϵ:防止除以 0 的小常数(如 1e−8)
在这种方法下就很好的解决了之前的问题:
如果某个参数的历史梯度一直很大,那它的 GtG_tGt 就大,学习率就变小 → 避免剧烈震荡
如果某个参数的历史梯度一直很小,学习率就不怎么缩 → 它还能继续学
但是它也存在一个明显的缺点,那就是因为G_t是不断累积的,所以到了后期梯度会变得很小,导致模型参数基本不更新。
RMSProp
为了解决AdaGrad随着时间推移,模型参数基本不更新的问题,RMSProp被提出。
它用指数加权移动平均(EMA)来更新梯度的平方,公式如下,即E[g^2]_t中越往前的梯度f对于当前的E[g^2]_t的影响就越小,从而使得学习率最后不会降为0,而是一直保持一定的平衡:

然后更新参数时使用:

γ:衰减系数(典型值 0.9)
η:学习率
g_t:当前梯度
E[g^2]_t:当前参数历史梯度平方的加权平均
ϵ:小常数,防止除以 0
类比理解一下:
AdaGrad:你每次都把经验“记下来”,越记越多,最后太谨慎,啥都不敢动了 🙈
RMSProp:你只记“最近几次”的经验 → 有记忆,但也保持灵活,适应当前环境 🧠✨
Adam
总的来说,Adam = Momentum + RMSProp + 偏差校正,它是一种带动量的、带自适应学习率的优化器。
它吸收了前人经验,既有方向记忆(动量),又能差异化学习率(RMSProp思想),而且还做了聪明的偏差修正,让前期更新不“失控”。
Adam 给每个参数记录了两个“动量”:
- 一阶矩(梯度的滑动平均):

像 Momentum:记录梯度方向的平均值
- 二阶矩(梯度平方的滑动平均):

像 RMSProp:记录梯度的幅度变化(用于调整每个参数学习率)
此外由于在训练初期,m_t和v_t会偏向于 0(因为一开始动量积累值太小)
Adam 加了修正项:
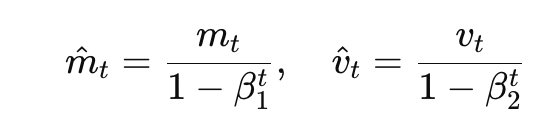
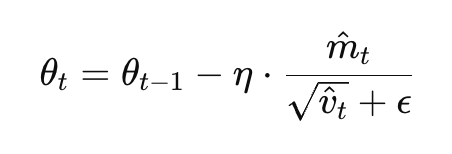
最终参数更新的公式如下:
可视化理解一下的话,Adam 就像一个聪明的登山者:
手里有指南针(动量)🧭
脚底有自适应的避震鞋(学习率调整)👟
前期还会做“热身”(偏差校正)🔥
→ 一路平稳往谷底走,不会乱跳也不会卡住
和前面的优化器对比一下,得到如下的结果:
AdamW
权重衰减
在介绍AdamW之前,我们需要先理解一下权重衰减的概念。
权重衰减指的是在训练过程中,让模型参数自动变小,从而防止过拟合,需要权重衰减主要有两个原因:
防止过拟合:参数太大可能在训练集上学得很好,但泛化能力差。衰减可以让它更“温和”地拟合数据。
提升数值稳定性:过大的参数可能导致不稳定,比如梯度爆炸或输出范围奇怪(尤其在 softmax/logits 中)
一般而言,在训练模型时,对于Loss我们有:

比如交叉熵损失、均方误差之类的。
为了进行权重衰减,我们可以在计算Loss时加入一个L2正则项:

L(θ)是原本的损失(衡量模型对训练集的拟合)
||θ||^2 是参数向量的平方和(越大说明参数越激进)
λ是一个超参数,控制“惩罚力度”
对于SGD,在加入了L2正则项后,损失函数再对θ求导可以得到:

再把 2λ 合并写成 λ,并将参数写全就可以得到:

再整理一下得到:

而在SGD加L2正则可以做到权重衰减,但是对于Adam却有了问题,因为Adam 中每个参数的更新方向会被“除以一个平方根的梯度平方平均”,也就是:
如果把 λ⋅θ加到这里就会导致梯度方向被缩放,权重衰减也被缩放!从而导致衰减效果不稳定,容易衰减不到位或者过头。
AdamW核心修改
为了解决Adam中权重衰减的问题,AdamW的做法是不把 λ⋅θ 当做“梯度的一部分”加进去,而是直接减掉,
AdamW下,参数更新的公式变成了:
θ = θ - η * ∇L - η * λ * θ
即直接减掉,不去受到学习率更新的影响。